주문진 배낚시 단체 사진 (2012.06)
주문진 배낚시 단체 사진 (2012.06)
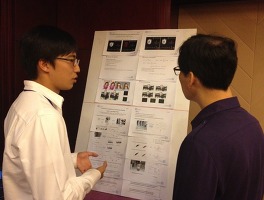
 2012 ICRA 논문발표 및 학회 참관 (2012.05)
2012 ICRA 논문발표 및 학회 참관- 논문 제목: ①Accurate Clibration of Two Wheel Differential Mobile Robots by Using Experimental Heading Errors ②Stackable Manipulator for Mobile Manipulation Robot- 발표자: 정창배, 이호열- 튜토리얼 및 워크샵 참관- 로봇 분야 최신 연구동향 파악- 로봇전시참관- 참가자: 정우진 교수 외 연구원 3명
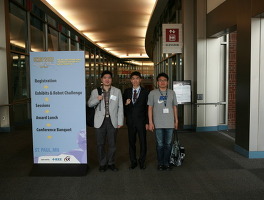
2012 ICRA 논문발표 및 학회 참관 (2012.05)
2012 ICRA 논문발표 및 학회 참관- 논문 제목: ①Accurate Clibration of Two Wheel Differential Mobile Robots by Using Experimental Heading Errors ②Stackable Manipulator for Mobile Manipulation Robot- 발표자: 정창배, 이호열- 튜토리얼 및 워크샵 참관- 로봇 분야 최신 연구동향 파악- 로봇전시참관- 참가자: 정우진 교수 외 연구원 3명