실내용 이동로봇의 위치추정에 관한 센서모델 설계 및
바퀴 미끄러짐에 의한 위치추정 실패 극복
문창배
연구내용
실제 환경에서 로봇이 자신의 위치를 추정하는 것은 다양한 불확실한 요인들에 의하여 많은 어려움을 가지고 있다. 그래서 이러한 불확실성에 적절히 대처하기 위하여 다양한 확률론적 위치 추정 기법이 연구 되어 오고 있다. 그 중에서도 최근에 각광을 받고 있는 몬테카를로 자기 위치 추정 기법을 기반으로, 본 연구에서는 바퀴 굴림 정보에 의하여 자신의 위치를 예측하고 2-D 레이저 스캐너에 의한 주변 환경에 대한 거리 정보와 로봇이 가지고 있는 환경 지도와의 매칭을 통하여 로봇 위치를 정확히 추정 하게 된다.


Probability Mapping Function
이때 다양한 동적 장애물들에 의한 센서 정보 오염과 바퀴의 미끄러짐에 의한 잘못된 인코더 정보가 신뢰성 있는 위치 추정을 어렵게 하는 주요 요인들이다. 또한 바퀴의 미끄러짐에 의하여 로봇 위치 추정에 실패 하는 경우가 생기게 되는데 기존의 맵 전체 범위에 샘플을 뿌려 로봇의 위치를 다시 추정해 내는 전역적 위치 추정 방법은 시간이 오래 걸리고 많은 샘플이 필요하게 되는 단점이 있다. 이러한 상황에서 보다 효율적인 위치 추정이 가능하도록 바퀴 미끄러짐에 의하여 위치를 잃어 버렸을 경우 가능한 최대 주행 범위를 구하여 그 안에서 로봇이 자신의 위치를 다시 추정해 낼 수 있는 준 전역적 위치 추정 알고리즘을 설계하였다. 또한 제안된 위치 추정 기법이 실제 환경에서 사람들에 의한 센서 오염과 고르지 못한 바닥에 의한 바퀴의 미끄러짐에도 신뢰성 있게 위치 추정이 가능함을 실험을 통하여 검증한다.
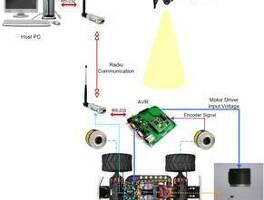
Experimental environments


센서모델 실험

준전역적 위치추정 실험
이산 주행 행동 구현 및 구현된 주행 행동 선택에 대한 연구
이동 로봇의 주행 방법은 센서기반 주행 기법과 모델 기반 주행 방법으로 크게 분류할 수 있다. 센서기반 주행 기법은 로봇 동적 장애물에 강인하고 계산이 간단하다는 장점이 있지만 최적화된 경로 생성에 한계가 있다는 단점이 있다. 이에 반해서 모델 기반 주행은 최적 최단 경로 주행을 보장하지만 동적 장애물에는 취약한 단점이 있다. 본 연구에서는 이러한 각각의 개별 주행 기법이 가지는 장점을 실제 로봇 주행에서 최대한 발휘하기 위해서 개별 주행 행동에 대한 적합한 주행 행동 선택 기법을 개발하고 이를 실험적으로 검증하여 그 유용성에 대해서 보인다.

Robot motion control simulation using the player/stage
Robot motion control simulation using the Player/Stage
AutoMove 주행 행동 동영상
Contour-tracking 주행 행동 동영상
전체 주행 동영상
'Research' 카테고리의 다른 글
| 거리센서에 기반한 안전하고 빠른 주행기법 개발 (0) | 2010.01.21 |
|---|---|
| Experimental Research of the automatic parking control using a RC Car (0) | 2010.01.21 |
| Path Planning for Auto Car-Parking using M-Space (0) | 2010.01.21 |
| Collision Avoidance (0) | 2010.01.21 |
| Autonomous map building and localization of a service robot (0) | 2010.01.21 |