거리센서에 기반한 안전하고 빠른 주행기법 개발
최민기
연구내용
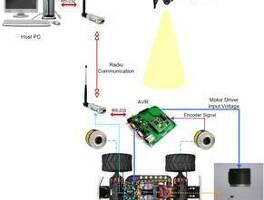
시야정보를 이용하여 시야가 제한된 영역에서 출현하는 잠재적인 장애물에 대한 충돌에 안전하고 빠른 주행기법을 개발한다.

로봇이 감지 하지 못하는 영역에서 출현하는 장애물에 대해 잠재적 충돌 위험성이 존재 한다. 이를 주행에 반영하려면 충돌에 대한 위험도를 정량화 해야 한다. 시야 제한의 원인이 되는 돌출된 모서리로부터 거리에 따른 충돌 위험영역을 설정하고 충돌에 안전한 최대 속도를 제한 함으로서 안전하면서도 빠른 경로생성 및 속도제어를 수행할 수 있다.

'Research' 카테고리의 다른 글
| 차량견인 트레일러 시스템의 운전자 친화형 후진제어 기법 개발 (0) | 2010.01.25 |
|---|---|
| Experimental construction and comparison of motion model of wheeled mobile robot (0) | 2010.01.21 |
| Experimental Research of the automatic parking control using a RC Car (0) | 2010.01.21 |
| 실내용 이동로봇의 위치추정에 관한 센서모델 설계 및 바퀴 미끄러짐에 의한 위치추정 실패 극복 (0) | 2010.01.21 |
| Path Planning for Auto Car-Parking using M-Space (0) | 2010.01.21 |